Bush trip : utiliser le GPS de l'avion
Les missions de type vols de brousse (Bush Trip) de MSFS sont, en principe, des vols VFR, donc sans autre aide que le log de navigation fourni à chaque étape. Dans la réalité, on prépare toujours son vol en le traçant sur une carte.
Les indications ne sont pas toujours très explicites et le pilotage seul est suffisamment occupant pour qu'on ne profite pas vraiment des paysages survolés. D'autant plus si on ne connait pas bien l'avion fourni avec la mission.
La plupart des avions proposés (et on peut les changer, voir notre tuto) sont maintenant équipés de GPS Garmin et aussi d'un pilote automatique.
Une des particularités de ces vols, c'est qu'un plan de vol est créé dans les fichiers de la mission (fichier .FLT et fichier .PLN) et que ce plan de vol est automatiquement chargé dans le GPS équipant l'avion au démarrage du vol.
Nous allons le détailler dans ce tuto en utilisant l'étape 01 du vol de brousse "Côte du Queensland septentrional" contenu dans le dossier "...\Official\OneStore\microsoft-bushtrip-greatbarrier".
L'avion proposé est le Xcub crafter hydravion, facile à piloter et équipé de l'excellent GPS Garmin G3X Touch. Le tuto est valable pour n'importe quel avion équipé d'un GPS. Cet avion est équipé d'un train rentrant et d'une hélice à pas variable.

Au lancement, on a la carte générale (pas très explicite)

Puis on se retrouve au début de la première étape

En cliquant sur Continuer, on arrive dans l'avion (vue externe) souvent déjà démarré (attention à avoir les bons fichiers manettes dans les bonnes positions). La carte VFR (pas très utile) et le log de navigation sont présents dans des fenêtres séparées. Si on peut grand écran ou deuxième écran), il est utile de garder le log de nav afin de voir ce qui est dit sur les lieux traversés.
Dans le cockpit du Crafter voici le Garmin G3X touch (1) et le pilote automatique (2) :

Le G3X fournit toutes les données utiles au pilotage :
- indicateurs moteur : richesse, puissance, hélice, etc.
- l'horizon avec la vitesse, l'altitude, la V/S, le cap, etc.
- la carte dynamique du vol affichée en cliquant sur le bouton Split (en haut à droite).
En modifiant le facteur de zoom de la carte, on voit que le plan de vol complet de la mission a été chargé

Bien sûr, on va reprendre le zoom pour ne voir que l'étape en cours : de YBCS à YTUY
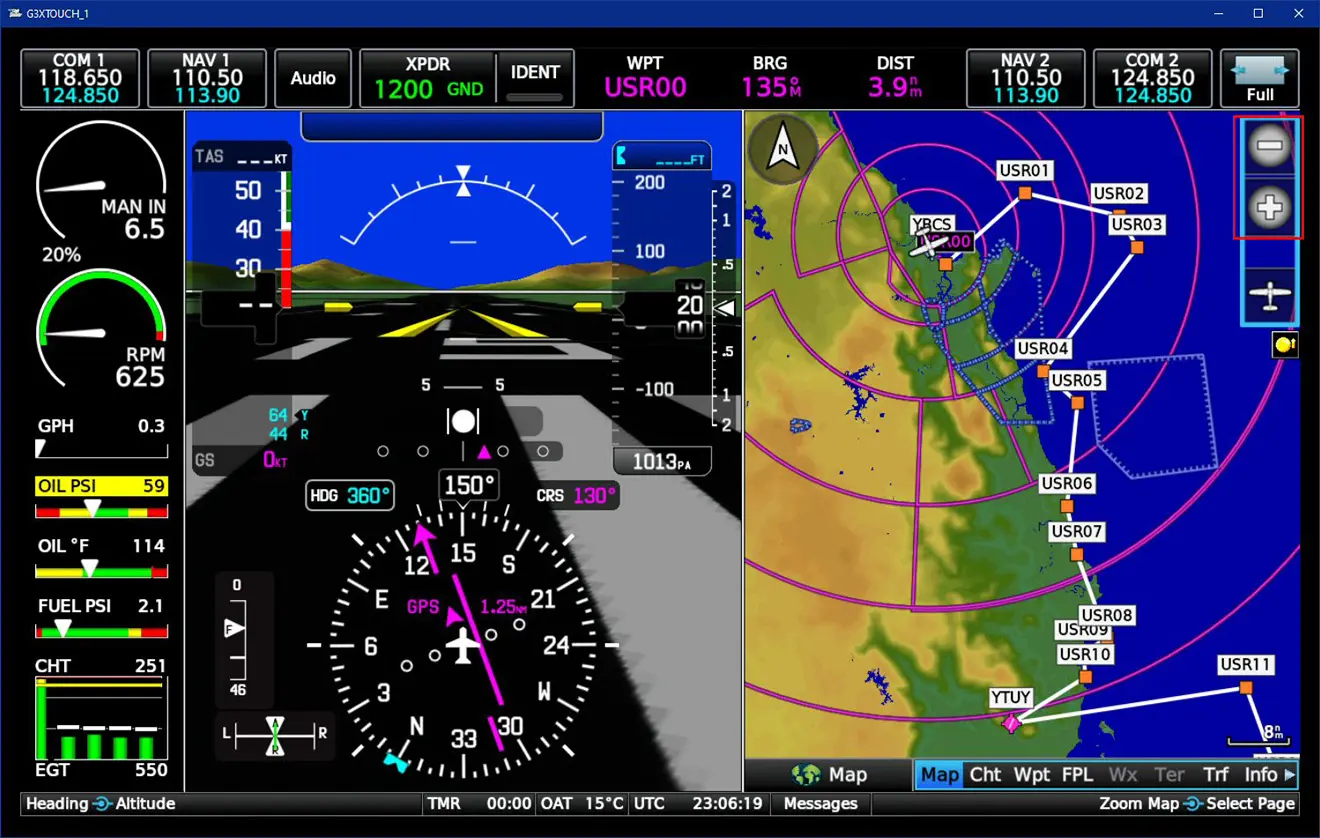
On voit aussi que l'avion est symbolisé et qu'on pourra donc suivre sa trajectoire sur cette carte (qu'on peut centrer sur l'avion ou pas).
On peut se contenter de cette préparation et voler en VFR en pilotant pour bien rester sur la trajectoire et en réglant son altitude et ses paramètres moteur.
On peut aussi aller plus loin et, pour mieux profiter des paysages survolés, utiliser le pilote automatique de l'avion.
Bush trip avec pilote automatique
Avant de décoller, on va programmer une "Direct To" vers le premier point (ou un autre) du plan de vol (USR01 dans notre exemple) en cliquant sur le bouton encadré en rouge.

La fenêtre d'entrée s'ouvre et on sélectionne le point voulu.

On va aussi régler l'altitude visée (2000 ft) et la V/S (500 ft/mn).

Dès que l'avion a décollé, on enclenche le pilote automatique et la NAV en appuyant sur les boutons correspondant.
Attention : vérifier que l'indication GPS est bien affichée en haut de l'écran du Garmin.

Il n'y a plus qu'à suivre son vol et à regarder les paysages survolés, l'avion suivra la trajectoire du GPS.
Attention toutefois aux modifications d'altitudes du log de nav sachant que certains avions (dont le Crafter) ne sont pas de bons "grimpeurs".
On ne reprend la main (arrêt de la NAV et désengagement du PA) que pour l'arrivée (dernière branche).
L'arrêt sur la piste de l'aérodrome d'arrivée affiche la bonne fin de l'étape et son enregistrement.

La sortie du bush trip permet de visualiser le pourcentage effectué.
